Projects

Undersea Vision-Based Navigation and Pose Determination for Human-Robot Teaming
Undersea vision-based navigation and pose determination will enable divers and robots to collaboratively solve complex tasks in an inherently unstructured environment.
Tags

ALCOR Radome Replacement
An aging weatherproof enclosure protecting one of the space surveillance radars on Kwajalein Atoll is replaced.
Tags

Machine Learning in Resource-Constrained Environments
Robust, trustworthy, and safe machine learning algorithms that operate in resource-constrained environments will improve missile defense and other target recognition and mission planning systems.
Tags
Low-Cost Localization Using Distributed Adaptable-Response Transponders
A deployable navigation network of small, low-cost radio transponders can help track the locations of first responders during rescue operations.
Tags
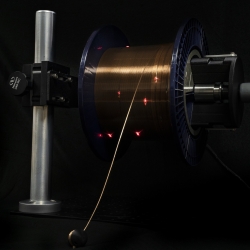
Fiber Sensor Array Buoy
A small, low-cost system that leverages long-length fibers embedded with electronics could provide persistent monitoring of the undersea environment.
Tags

Arctic Climate Change Detection Network
We are developing a sensor network to improve our understanding and monitoring of sea ice breakup in the rapidly changing Arctic region.
Tags

Coordinating Teams of Autonomous Systems
We developed new distributed coordination algorithms for deploying multiple autonomous systems from a single set of operator commands.
Tags

Autonomous High-Resolution Ocean Floor Mapping
The Laboratory is working to develop a novel seabed-mapping capability that can achieve high-resolution imaging and a fast coverage rate.
Tags

Strike Group Defender
A serious game developed by the Laboratory will help the U.S. Navy teach sailors how to defend ships against missile threats.
Tags