Vine Robots for Collapsed Structure Mapping
Urban search and rescue (USAR) personnel must find, access, and extract trapped victims in hazardous terrain and under extreme time pressure. To enter these confined spaces they use a variety of cumbersome or rigid tools, including concrete saws and blow torches, to cut through debris and create a human-sized entry hole. Currently, practitioners rely on endoscopes and search cameras to preview void spaces – spatial pockets created in a pile of a collapsed structure – before entering. However, these can only be inserted on a straight line directly accessible by the search team and void spaces are unstructured and tortuous, making them difficult to explore with such inflexible tools. Currently, this process from search to safe extraction can take several hours, during which the victims remain at risk.
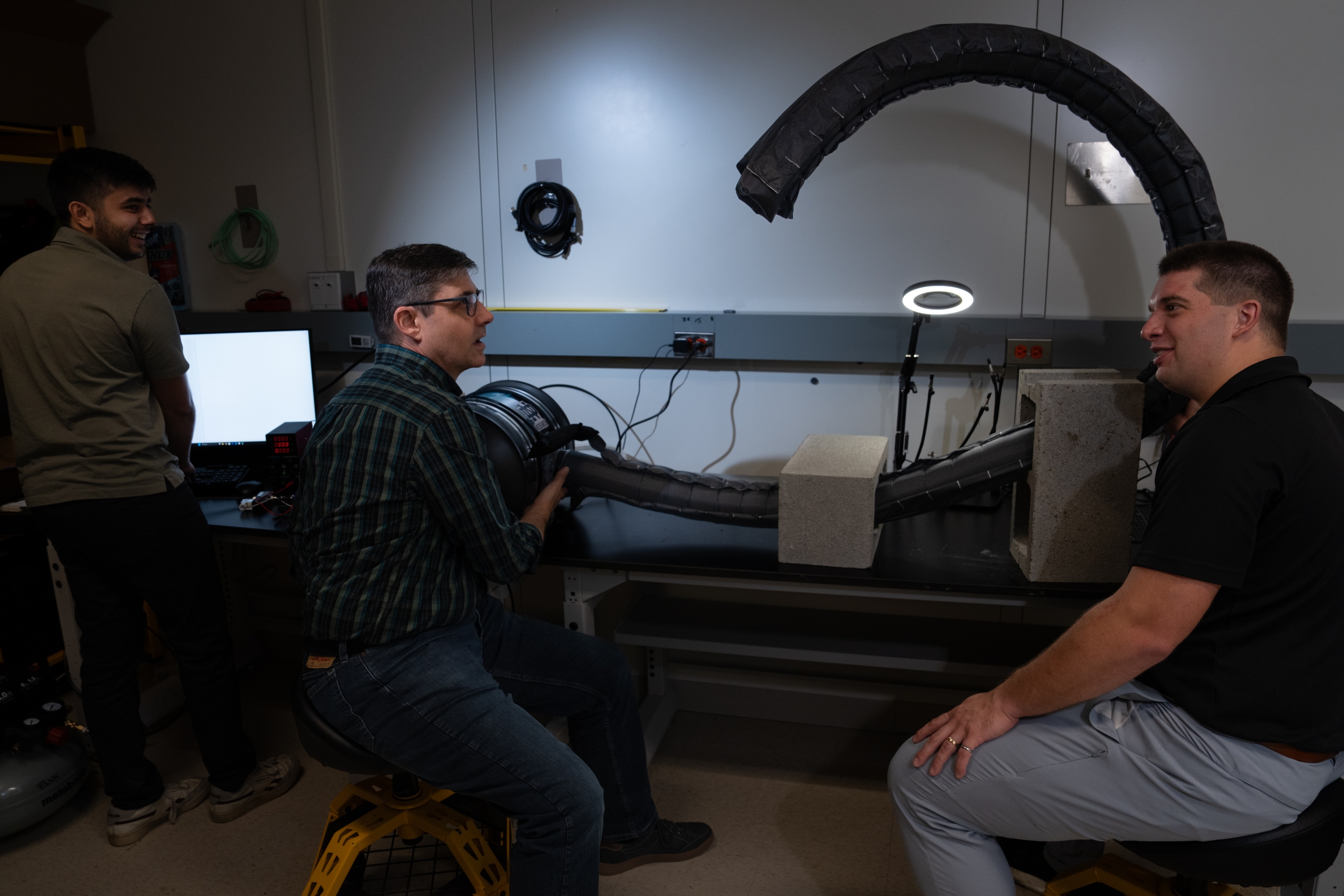
The ability to fully explore void spaces presents an opportunity to enhance situational awareness for USAR personnel as well as minimize time spent cutting entry holes into piles. In collaboration with Professor Margaret Coad from the University of Notre Dame, we are developing a flexible robot and paired sensory system that can help with this task, allowing users to quickly and accurately navigate and map the difficult void space terrain through rubble. The robot, called a vine robot, is an inflatable tube made of a thermoplastic polyurethane-coated nylon frame that extends from the tip by turning itself inside out when air is pumped inside. It is steered by an operator and has a series of pouch motors that enables it to navigate through a 3D space using only air pressure to force its way through small spaces. A camera installed at the tip collects images of the surrounding space and tracks the robot's position. The robot is also designed to be easily repairable and ultra-low cost.
In 2024, we met with the Notre Dame team to test the robot's maneuverability at the Massachusetts Task Force One engineered structural collapse site in Beverly, MA, with feedback from first responders. We are now developing the backend system that will build a 3D map of the environment to display to the operator, allowing USAR teams to explore and understand complex structure collapses before a human needs to enter the space.

System development will continue through April, 2025, and include additional field studies and engagements. The development process includes active collaborations with first responders and USAR task forces to develop a robot that is both reliable and intuitive. From these close partnerships, we hope to make vine robots a standard tool in every USAR team inventory. Additional applications include enclosed space inspections, underwater operations, and other austere environments.
For more information on this project, please contact Nathaniel Hanson.
Related
News

Predicting earthquakes by monitoring the ionosphere

CREWSnet project forecasts a climate early warning system for all

Tiny satellite tests autonomy in space
